
Projets MOSAIC - DEPhI
Topic outline
-
♦ Projets Mosaic : Modélisation Optimisation Simulation Analyse Ingénierie Conception ♦
Concevoir et/ou modéliser un système optique complet en combinant différentes disciplines : optique instrumentale, photométrique, mécanique, optique physique, traitement des images, couches minces optiques
Encadrements des équipes : Gaëlle Lucas-Leclin, Julien Moreau, Franck Delmotte et Irène PapagiannouliFormation et suivi SolidWorks : David Holleville et Arnaud Jérome
--> + d'infos sur les sujets dans la présentation ci-dessous et les menus ci-contre.
Modalités d'évaluation
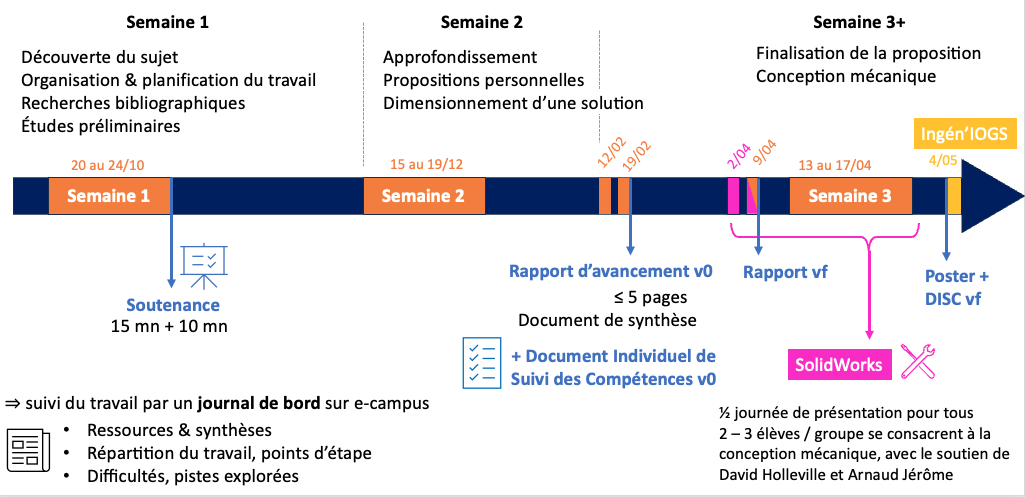
- Une soutenance de 15 min + 10 mn de questions en fin de première semaine ou vous présenterez votre bibliographie, les éventuelles premières simulations numériques et une liste des tâches pour la suite.
- Remise d’un rapport et des documents collaboratifs de suivi du projet après la 2ème semaine
- Remise d'un document individuel de suivi des compétences mises en œuvre dans le cadre du projet
- Présentation d’un poster lors d’IngénIOGS en fin d’année + documents collaboratifs de suivi du projet
-------------------------
♦ Projets DEPhI : Développement Expérimental en Photonique Ingénieuse ♦
Concevoir, réaliser, tester et documenter un dispositif scientifique complet.
Encadrements des équipes : Fabienne Bernard, Jeanne Bernard, Arnaud Dubois, Sylvie Lebrun, Rosa Tualle-Brouri, Benjamin Vest, Lionel Jacubowiez, Julien Villemejane, Thierry Avignon, Cédric Lejeune.
+ d'infos
-------------------------
♦ Planning ♦
Les projets MOSAIC et DEPhI se clôturent par le forum IngénIOGS prévu le 04 mai 2026.
-
Vous trouverez dans cette section les informations générales relatives aux projets MOSAIC et les documents partagés.
-
Retrouvez toutes les infos sur le site web du LEnsE :
-
Retours sur les soutenances - Semaine DEPhI 1
Les résultats statistiques (envoyés aussi par mél juste après les soutenances) sont disponibles ici :
-
DISC - Document Individuel de Suivi de Compétences Devoir
-
Poster IngénIOGS 2026 Devoir
Les attentes pour le poster et la présentation orale sont décrites sur la page dédiée sur le site du LEnsE.
-
DISC version finale - Document Individuel de Suivi de Compétences Devoir
-
Annonces DEPhI Forum
-