
Etape 1: Traitement de l’image de THRS
1.1 Segmentation de l’image
L’image optique THRS est d’abord segmentée en zones homogènes sous forme de polygone (objets).
Une segmentation consiste en un regroupement de pixels suivant les mêmes propriétés prédéfinies. Les pixels sont alors regroupés en régions (encore appelés objets ou segments). Elle crée un lien conceptuel avec une perception humaine en essayant d'imiter la capacité de perception du photo-interprète à délimiter des zones homogènes. Il existe différents algorithmes qui permettent de générer une segmentation. Les segments ainsi créés sont aussi appelés objet et sont la base de la classification orientée objet. Toutes les études s’accordent sur le fait que les méthodes orientées objet permettent une plus grande flexibilité dans la capacité à transférer des stratégies de classification basées sur des images et des relevés de terrain récents vers des classifications sur des images passées où les relevés de terrain sont souvent inexistants. Par conséquent, la couche de segments ainsi générée servira de référence spatiale pour les traitements et les classifications qui suivent.
La technique de segmentation retenue est celle de Baatz-Shape. Cette technique de segmentation multi-résolution est une technique ascendante de croissance par paire de régions qui débute par un ensemble d’objets correspondants à un seul pixel de l’image. Les plus petits objets sont ensuite fusionnés de façon itérative dans de plus grands en fonction des critères d’homogénéité utilisant l’information des bandes spectrales de l’image ainsi que la forme des objets courants. Le processus s’arrête lorsque l’homogénéité des objets candidats à la fusion dépasse un seuil d’hétérogénéité maximale acceptée.
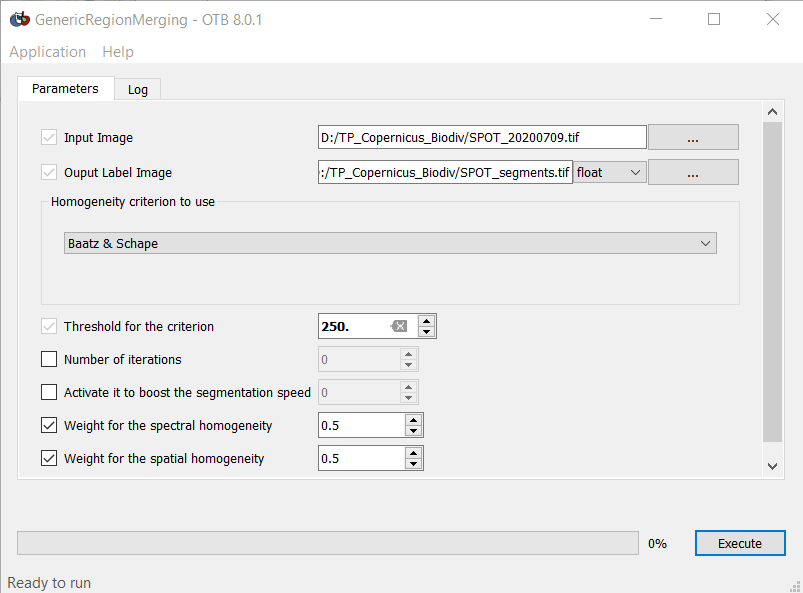
Cette méthode de segmentation multi-résolution a été développé à l’origine dans le logiciel propriétaire eCognition, elle a été pzar la suite implémenté dans OTB via l’application GenericRegionMerging.
Dans Mapla, sélectionner la fonction Segmentation> GenericRegionMerging
3 paramètres sont à prendre en compte :
th : Seuil du critère, valeur de seuil (sans unité de mesure) pour le critère du maximum degré d’hétérogénéité des objets produits par la segmentation. Une valeur plus grande produit des plus grands segments.
cw : Poids pour l’homogénéité spectrale, d’une valeur entre 0 et 1, il définit l’importance relative de la radiométrie (couleur) dans le critère d’agglomération. Une valeur égale à 0 impliquera que les objets seront optimisés exclusivement par leur homogénéité spectrale.
sw : Poids pour l’homogénéité spatiale, d’une valeur entre 0 et 1, il définit l’importance relative de l’information de forme. Une valeur de 0 correspond à des objets de forme plus sinueuse. Une valeur plus élevée implique une majeure compacité. Dans la théorie, un cercle est la forme plus compacte possible.
La segmentation est un processus long qui peut prendre quelques minutes.
La segmentation ainsi réalisé est un raster, il doit être maintenant transformé en raster dans QGis en utilisant l’outil Polygonize.
→ Sauver la vectorisation sous le nom de segments.shp.
Afficher la segmentation en faisant apparaître l’image SPOT_20200709.tif en fond, comme ceci :
